


Se ha finalizado con éxito el proyecto SIP.
Conocer la localización de un individuo de forma precisa es un factor clave en la entrega de información y servicios con gran relevancia contextual. Las aplicaciones que explotan la localización indoor actualmente utilizan tecnologías tales como Wi-Fi, imágenes, balizas ultrasónicas, geomagnetismo, beacons entre otros. Un sensor de localización indoor preciso, en combinación con las aplicaciones móviles, permitirá una nueva generación de servicios e información muy personalizados.
Los principales sectores a los que va dirigido nuestro proyecto incluyen:
– Gestoras de centros comerciales
– Espacios de ocio, ferias, conciertos, casinos, discotecas y espacios públicos
– Empresas de Marketing y Eventos
– Universidades, Centros de Estudios (BA), Centros y colegios innovadores
– Centros Deportivos: Palacios multidisciplinares, Estadios
– Operadores de Telefonía e Internet con canal comercial propio
– Industria: Con altos requerimientos de comunicación y necesidades de aplicación de técnicas LEAN
– Cadenas de Retail (Electrónica y alimentación principalmente)
– Hoteles y Resorts
SIP (Sistemas de Indoor Positioning) es un sistema de Localización Indoor wireless que está siendo desarrollado en Air-Fi basado en fingerprinting (radiomapa) y que se apoya en la medida de las señales WIFI y Bluetooth Low Energy. Los AP wifi y Beacons BLE emiten pulsos de advertising que se atenúan con la distancia al punto emisor y con las características de un espacio indoor. La medida de estas distorsiones en la potencia y la identificación de su singularidad permite identificar la posición estimada de activos y personas.
La utilización de sistemas inerciales de navegación (acelerómetros, giróscopos y brújula) disponibles en los smartphones permiten el cálculos de dirección, velocidad y posición relativa, variables que contribuyen a mejorar los métodos basados en firgerprint.
API para smartphones
La API móvil de IPS se ejecuta en el dispositivo móvil e implementa un motor de posicionamiento interior-exterior y, como resultado, ofrece un servicio de posicionamiento en tiempo real a las aplicaciones móviles, permitiendo una amplia variedad de servicios basados en localización (LBS) que utilizan smartphones , Tabletas y otros dispositivos Android OS posibles. Además del posicionamiento, el API también ofrece detección de proximidad y un servicio de enrutamiento.
La tecnología de posicionamiento en interiores que implementa la API IPS se basa en la fusión de varias fuentes de información adecuadas para la geolocalización:
- Las señales Wi-Fi y Bluetooth Low Energy (BLE) transmitidas desde nodos de infraestructura,
- sensores inerciales del propio dispositivo, (en el caso de Apple no reporta medidas WiFi)
- información de la topología del edificio.
La API móvil de IPS también puede proporcionar posicionamiento por satélite (GPS, Glonass …) para exteriores, que en ese caso se hibrida con el posicionamiento en interiores antes mencionado para llegar a ubicarse en ubicaciones geográficas.
La API móvil de IPS se envuelve como un servicio de Android al que se puede conectar una aplicación móvil que se ejecuta en el mismo dispositivo móvil para acceder a la funcionalidad ofrecida.
Proceso de posicionamiento
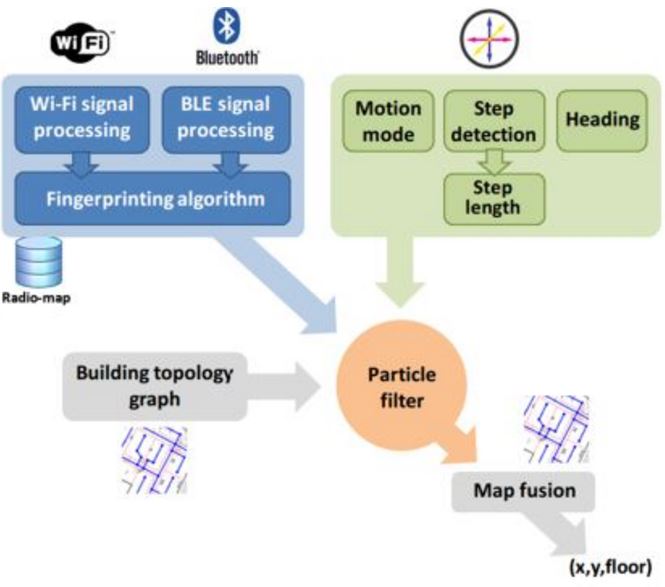
La API realiza mediciones de indicadores de intensidad de señal recibidas Wi-Fi y BLE (RSSI), los procesadores para el mitigar el ruido tanto como el sea posible y aplica algoritmos basados en huellas digitales para obtener una estimación de ubicación.
Por otro lado, el API obtiene las mediciones de los sensores inerciales del dispositivo (acelerómetro, giroscopio, brújula) y aplica un esquema de Pedestrian Death Reckoning (PDR) basado en la detección de pasos y la estimación de rumbo, apoyado para un reconocimiento de Modo de movimiento
Finalmente, la información de los recorridos utilizables del edificio también está disponible, por medio de un gráfico compuesto por los nodos conectados a través de bordes.
Estos diferentes tipos de información se fusionan por medio de un filtro de partículas, que obtiene la estimación de la posición del usuario casi final. El paso final consiste en refinar la posición mediante un método de fusión de mapas basado en la correspondencia de mapas. La siguiente figura muestra un bloque general de diagrama de todo el proceso de posicionamiento.
Proyecto cofinanciado por el Ministerio de Industria, Energía y Turismo, dentro del Plan Nacional de Investigación Científica, desarrollo e Innovación Tecnológica 2013-2016 y por el Fondo Europeo de Desarrollo Regional (FEDER).
(Proyecto TSI-100600-2015-58)
